Дел Акција: 125
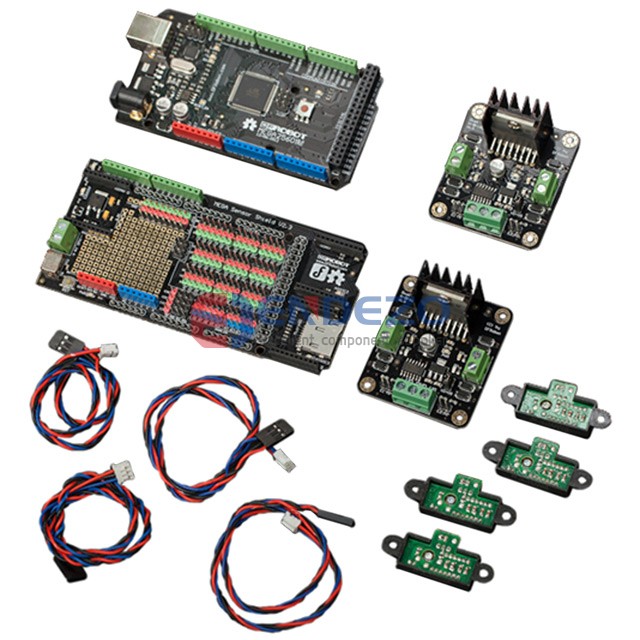
Конфигурација: Wheeled, Искористен IC / Дел: ATmega32U4, URM37, Систем за интерконекција: Arduino R3 Shield, Gravity, Xbee, Предложено опкружување за програмирање: Arduino IDE, Вклучени одбор на MCU / MPU: DFRobot Romeo V2, Содржина: Board(s), Cable(s), Chassis, Components, Hardware, Sensor(s), Servo(s), Wheel(s),